
* There was considerable interest in vertical take-off & landing (VTOL) aircraft following World War II -- resulting in a staggering range of different designs, not all of them inspiring much confidence. One of the more dubious approaches to VTOL in that era was the "pogo" or "tailsitter", an aircraft that would take off and land standing on its tail. Following up on unbuilt concepts proposed by the Germans during the war, both the Americans and French built pogo demonstrators, with both deciding it wasn't a good idea -- at least at the time. This document provides a short history of the flying pogos.
* The idea of the "flying pogo" -- an aircraft that took off and landed standing vertically on its tail -- goes back to World War II at least. As the war tilted ever more painfully against the Nazis, the Germans found the skies over the Reich increasingly dominated by Allied air power, with airfields bombed and shot up on a regular basis. Obviously, it might be nice to have combat aircraft that could take off and land anywhere.
In late 1944, Heinkel engineers working in Vienna drew up a design for the "Wespe (Wasp)", a pogo interceptor with a length of 6.2 meters (20 feet 4 inches), a tripod tail arrangement with wheels on the tips of the fins, and an "annular" (ring) wing with small auxiliary flat wing stubs and the prop rotating inside the wing. The Wespe was to be powered by the Heinkel S021 turboprop, a derivative of the Heinkel S011 turbojet, and was to be armed with twin MK 108 30-millimeter cannon. Top speed was estimated at almost 800 KPH (500 MPH).
The Wespe was a lost cause from the outset: the He S011 turbojet never reached production, and as it would be learned later, getting turboprops to work was not as easy as jet engine pioneers assumed early on. In early 1945, work moved on to a new design, the "Lerche (Skylark)", which had the same armament and general configuration as the Wespe but was instead powered by twin Daimler-Benz DB 605D water-cooled inline-vee engines mounted in tandem in the fuselage and driving contra-rotating props inside the annular wing.
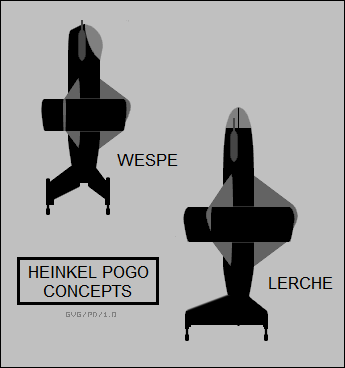
Another difference from the Wespe was that the pilot lay prone in the Lerche instead of sitting in a seat -- which meant the pilot stood straight up when taking off or landing, allowing him to look down and around more easily. The Lerche was also somewhat bigger, with a length of 9.4 meters (30 feet 10 inches) but could still attain 800 KPH (500 MPH), at least on paper. The design of the Lerche reached the point where a prototype could have been built -- but given the desperation of the German Reich's circumstances in the spring of 1945, there was no way it could have happened.
* The Wespe and Lerche were imaginative, but they were still not quite in the same league as another pogo concept developed by the Focke-Wulf company, the "Triebfluegel (Powered Wing)". The Triebfluegel featured three straight wings mounted on a rotating ring in the aircraft's midsection, with each wing tipped by a Pabst ramjet; various booster schemes were considered to get the rotating wing up to speed so the ramjets would start. The pilot could rotate the wings so that the ramjets were pointed almost level to the plane of rotation of the wings, in principle allowing the aircraft to hover, or pivot the ramjets forward to provide thrust for forward flight.
Focke-Wulf began development of the Triebfluegel in September 1944. Projected speed was 1,000 KPH (620 MPH), with a rate of climb of 7,620 meters (25,000 feet) per minute, and the aircraft was to have been armed with two MG 151 20-millimeter cannon and two MK 103 30-millimeter cannon. A wind tunnel model and the ramjets were tested, but no Triebfluegel prototype was ever completed. It is something of a pity that it was never built, not because it seems to have been a bright idea -- it more suggests the inclination of German engineering to be too clever for its own good -- but because it leaves unanswered the question of if it could have ever actually been made to work.
BACK_TO_TOP* The Germans never had a chance to prove the pogo concept, but in the postwar period, work continued on the idea. The US Navy became interested in the concept of operating aircraft off of small vessels instead of aircraft carriers, and in 1950 the service began a competition to obtain VTOL demonstrators to evaluate the concept. Convair, Goodyear, Lockheed, Martin, and Northrop all submitted designs; two finalists were selected to build prototypes, with Lockheed to provide the "XFV-1", and Convair to provide the "XFY-1".
* The Lockheed XFV-1 was the first to take to the air. It was a cigar-shaped aircraft with straight, tapered wings, plus an "X" arrangement tail, the four tailfins being at 45 degree angles relative to the wings, with small wheels on each of the four tailfins. It was powered by an Allison T40 turboprop, which was a "twinpack" engine consisting of two T38 turboprop engines coupled together to drive a Curtiss Electric contra-rotating propeller system, featuring three paddle blades on each of the two prop stages. The pilot sat on an ejection seat that could tilt forward to provide a better view in vertical take-offs and landings. Control in vertical flight was by the control surfaces on the tailfin; the 45-degree configuration was to prevent the tailfins from being aerodynamically masked by the wings. The aircraft was nicknamed the "Salmon", after Lockheed test pilot Herman "Fish" Salmon.
The demonstrator was not armed; planned armament consisted of a pod on each wingtip with twin 20-millimeter cannon, for a total of four cannon. The unusual wingtip armament scheme was driven by the impracticality of developing synchronizing gear to allow the cannon to fire through the contra-rotating prop assembly. Wingtip pods carrying a total of 48 unguided rockets were also considered as alternate armament. A special trolley was developed to allow the Salmon to be carted around on the ground. The trolley could set the aircraft to the vertical position for a take-off and then, mission complete, tilt it back on the level again.
However, for test flights the XFV-1 was fitted with fixed landing gear for conventional horizontal take-offs, since nobody thought it wise to try to take off and land vertically until the aircraft had been thoroughly evaluated. Besides, the aircraft's XT40-A-6 engine, which provided 4,365 kW (5,850 SHP) take-off power, didn't provide enough power to support the weight of the XFV-1 in straight-up flight. The intent was to later update the aircraft to the XT40-A-16 variant, with 5,090 kW (6,825 SHP), for full flight tests.
___________________________________________________________________
LOCKHEED XFV-1 (PROJECTED SPECIFICATIONS)
___________________________________________________________________
wingspan:
8.36 meters (27 feet 5 inches)
wing area:
22.85 sq_meters (246 sq_feet)
length:
11.23 meters (36 feet 10 inches)
empty weight:
5,260 kilograms (11,600 pounds)
MTO weight:
7,360 kilograms (16,220 pounds)
max speed at altitude:
935 KPH (580 MPH / 505 KT)
service ceiling:
13,100 meters (43,300 feet)
endurance:
80 minutes
___________________________________________________________________
Initial flight was in March 1954, with a total of 27 flights performed in that year. By the fall of 1954, the Salmon was performing horizontal-to-vertical transitions in flight and the reverse at altitudes above about 300 meters (1,000 feet). The transitions could be performed, but once the XFV-1 was flying vertically it was almost impossible to control, tending to stagger around drunkenly while the pilot barely knew if he was rising or falling; a radar altimeter could have helped determine altitude, but it was difficult to make one of sufficient accuracy and light weight. The reliability of the T-40 engine system and the electrically-actuated contraprop system also left something to be desired.

Lockheed's Clarence "Kelly" Johnson had been enthusiastic about the pogo concept at first, but gradually came to dislike it, calling it "the only airplane we ever built which we were afraid to fly ourselves in the final tests." More engine power would have done little to address the controllability issues, and the thought of landing such an aircraft on a ship on the open seas was clearly absurd. Nobody ever tried to take off or land vertically in the XFV-1.
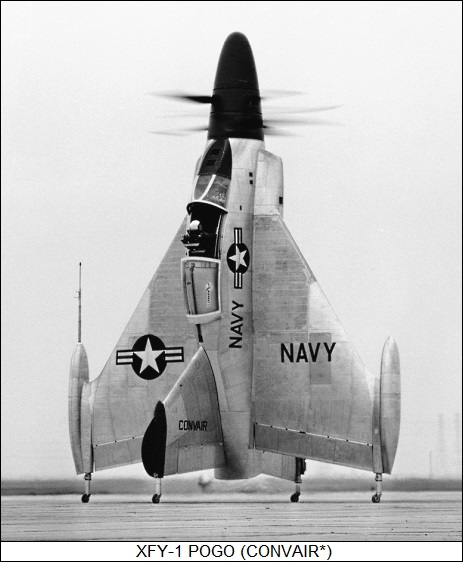
* The Convair XFY-1 was also powered by the XT40-A-16 twinpack engine and had a contra-rotating prop with three blades on each stage. It had a distinctly different configuration, with delta wings and both dorsal and ventral tailfins, with small caster wheels sticking out from the ends. As in the XFV-1, the Convair's pilot seat could tilt forward, and armament was to be four 20-millimeter cannon or 48 unguided rockets in wingtip pods.
___________________________________________________________________
CONVAIR XFY-1 (PROJECTED SPECIFICATIONS)
___________________________________________________________________
wingspan:
8.43 meters (27 feet 8 inches)
wing area:
32.98 sq_meters (355 sq_feet)
span over tailfins:
8.43 meters (27 feet 8 inches)
length:
6.98 meters (22 feet 11 inches)
empty weight:
5,325 kilograms (11,740 pounds)
MTO weight:
7,370 kilograms (16,250 pounds)
max speed at altitude:
980 KPH (610 MPH / 530 KT)
service ceiling:
13,300 meters (43,600 feet)
range:
540 kilometers (400 MI / 350 NMI)
___________________________________________________________________
A special trolley was built to haul the XFY-1 around. The ventral tailfin was trimmed at the tip, apparently to ease ground handling; it could also in principle be jettisoned to permit a belly landing. However, the ventral fin meant that the XFY-1 couldn't take off horizontally as a normal practice, and so the test flights had to feature vertical take-offs and landings from the beginning. That was seen as risky, so initial test flights were performed on a tether winched from the roof of the huge blimp hangar at Moffett Field in the San Francisco Bay Area. These initial tethered flights, performed by test pilot James F. "Skeets" Coleman, began in April 1954. The blimp shed was far from an optimum trials environment, since the confined downwash created turbulence and kicked up dust and debris; noise levels were deafening as well. If Coleman became insecure, he could cut the engine and tell the winch operator: "Catch me!"
Happily, Coleman didn't kill himself, and he made the first free flight -- a hop up and back down again -- on 1 August 1954. After extending the envelope, on 2 November 1954 Coleman performed what has been described as the first VTOL flight in history, taking off vertically, flying around horizontally, and then landing vertically. Nitpickers may argue over whether it really was the first, but it was enough to win Coleman the Harmon Trophy.
Landing vertically was of course an extreme challenge, with Coleman assisted by ground observers watching his progress and reporting his altitude. Coleman actually thought it would be relatively straightforward if he were given prone accommodations -- landing while standing up and looking down, not over his shoulder -- but the final judgement was that it wouldn't be worth the bother to try it out.
Another test pilot, Johnny Knebel, also took a shot at flying the XFY-1, relying on a briefing from Coleman and not bothering with tethered flights; apparently Knebel's flight was interesting if hair-raising to watch, demonstrating that it wasn't a good idea to skip the tethered flights after all. Much later, when Knebel asked if he thought it was a distinction to have flown the XFY-1, he replied: "Yeah, it was a tribute to my stupidity in attempting it."

* It didn't take long to realize that as it stood, the naval pogo fighter concept was a bust. Even if the take-off/landing scheme had been workable, the brute-force approach demanded a big engine in a minimally light airframe, and the result was poor payload and minimal fuel capacity. The XFY-1 effort was canceled along with the XFV-1 in 1955. Apparently the program had envisioned multiple prototypes of both aircraft, but only one was built of each; both survive as museum displays.
Incidentally, sketches survive of the unbuilt Northrop submission to the competition, the "N-63"; it looked a bit like the Lockheed XFV-1, but with straight wings in a shallow "vee' configuration, set well back and featuring wingtip pods; a small dorsal tailfin; and a large ventral tailfin with a tee tailplane.
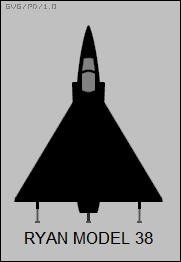
BACK_TO_TOP* The Navy also initiated work on a jet pogo, the Ryan "X-13". The Navy got this bright idea in 1946, and awarded a contract to Ryan for two prototypes of the "Model 38", as the company designated the design, in 1947. Ryan began by developing a ground test rig, built around an Allison J33 turbojet engine and operated under remote control, which then evolved into a tethered test rig that had a cockpit for a pilot, provided by a modified Boeing B-47 external tank.
The next step was a free-flying prototype. The Navy backed out of the effort in 1953, but the Air Force picked up the program, which by that time had been given the company designation of "Model 69" and service designation of "X-13". Two prototypes were built, powered by a non-afterburning Rolls-Royce Avon RA.28 turbojet providing 44.5 kN (4,535 kgp / 10,000 lbf) thrust. The X-13 was a stubby aircraft, with a high-mounted delta wing, finlets on the wingtips, and a very tall tailfin. It was much smaller than the Lockheed and Convair pogos, with only half the empty weight, there being no thought of using it as an operational system. The exhaust was moveable to provide vertical pitch and yaw control, while engine bleed jets in the wingtips provided roll control. The seat tilted forward to provide a better view in vertical flight.
___________________________________________________________________
RYAN X-13:
___________________________________________________________________
wingspan:
6.4 meters (21 feet)
wing area:
17.8 sq_meters (191 sq_feet)
length:
7.14 meters (23 feet 5 inches)
height:
4.62 meters (15 feet 2 inches)
empty weight:
2,425 kilograms (5,335 pounds)
MTO weight:
3,270 kilograms (7,200 pounds)
max speed at altitude:
560 KPH (350 MPH / 300 KT)
service ceiling:
6,100 meters (20,000 feet)
range:
310 kilometers (190 MI / 165 NMI)
___________________________________________________________________
Initial flight of the first prototype was on 10 December 1955, with Ryan test pilot Pete Girard at the controls. The X-13 took off and landed horizontally using an improvised external frame fitted with landing gear. Test flights in this configuration gradually extended to transitions to vertical and back to horizontal. The prototype was then fitted with a wheeled tail fixture called the "roller skate" for vertical take-off and landing hops. The first vertical test hop was on 28 May 1956, again with Girard at the controls. The second prototype also went into flight tests at that time, once again initially with fixed landing gear. The second prototype had a slightly modified canopy to provide a better field of view.
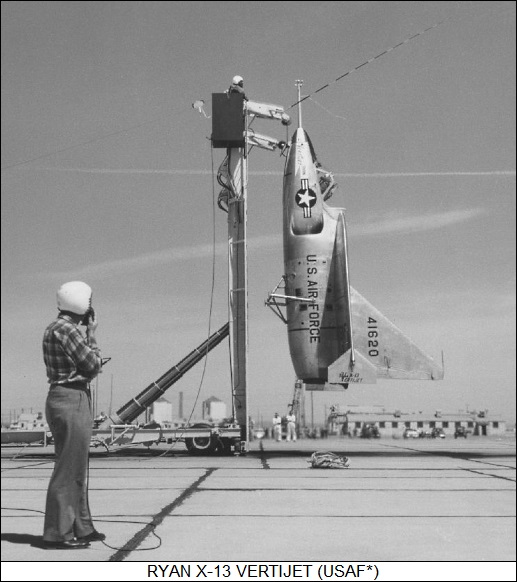
The "definitive" take-off and landing scheme of the X-13 featured the aircraft fitted with a nose hook and carried on a special trailer. A truck took the trailer to the launch area; the pilot got in, and then the trailer bed was hydraulically jacked up to the vertical position, with a cab where a ground crewman could monitor the take-off and landing. The hook on the X-13 engaged a trapeze that swung out from the top of the erected trailer bed. The first complete flight using this scheme, from vertical take-off to horizontal flight to vertical landing, was on 11 April 1957.
The X-13 program was well managed and went fairly smoothly. Test pilots actually seem to have become fairly comfortable with vertical take-offs and landings, the trapeze system making the scheme more workable, and several demonstration flights were performed through the year, including flights in Washington DC. However, on closer inspection the X-13 suffered from the same problems as the other pogos: the vertical take-off / landing scheme was operationally impractical, and the payload-range capability was poor. The program was killed off in 1958, with both prototypes surviving as museum displays.
BACK_TO_TOP* The French Societe Nationale d'Etude et Construction de Moteurs d'Aviation (SNECMA) worked on a jet pogo fighter in parallel with American efforts. The idea was to develop an interceptor with an annular wing that could take off vertically to engage intruders on a quick-response basis; it was conceptually along the lines of a recoverable surface-to-air missile.
SNECMA began by building a pulsejet-powered model about the size of a trashbin that performed indoor tethered tests in 1955 and 1956. A pulsejet is a simple tube with a shutter in front; fuel is injected into the tube and ignited on a pulsed basis, with the shutter slamming shut in response. It's much like a ramjet, but unlike a ramjet can generate static thrust. A pulsejet lacks rotating parts and so has no gyroscopic action as does a turbojet, a feature that was seen as providing better controllability. A pulsejet is of course on the noisy side, and pictures of the model in flight show the audience holding hands firmly over the ears.
The next step was a full-size demonstration machine, built around the SNECMA Atar turbojet. The "C400 P1 Atar Volant (Flying Atar)" was nothing but an Atar in a cylinder with four-point, caster-tipped landing gear on the base of the cylinder. It was "flown" by remote control on a tether under a tall girder A-frame; it had a "vectored thrust" exhaust using deflector vanes to allow it to maintain flight control under the care of an autostabilization system. Flight tests of the C400 P1 began in 1955, and were completed in early 1957.

The C400 P1 never made any free flights. It was followed by the "C400 P2", which was much the same, but had an ejection seat and a control panel for a pilot mounted at the top. Test pilot Auguste Morel performed the first free flight on the C400 P2 on 14 May 1957. It was one of the most frightening-looking flying machines ever built, and it is something of a testimony to French audacity that anybody was willing to fly it. It did have an autostabilization system, however, and wasn't so hard to handle, partly because it couldn't be used for forward flight.
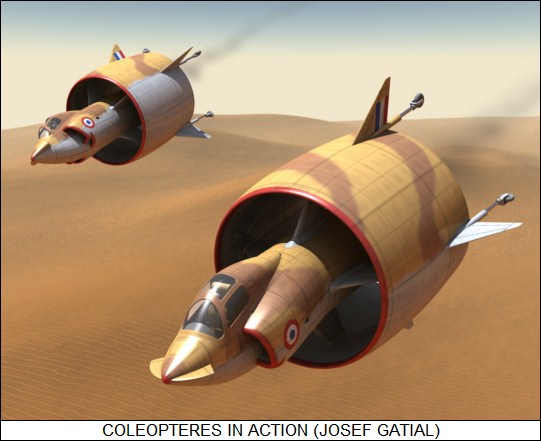
The C400 P2 was to be followed by "C400 P3" that added a real cockpit, but though one was built it never flew, being used for ground tests. Efforts moved on to a much more sophisticated prototype, the "C405 Coleoptere" -- the word translating generally as "beetle". It had a jet-fighter-type fuselage with an Atar engine in the rear, fed by side-mounted intakes, with windows added to the sides and bottom of the cockpit along with the canopy on top to improve the view of the pilot.
More unconventionally, it had a barrel-like annular ring, supported by four swept struts between the fuselage and the ring. The annular wing featured four small fins on its base, with caster-type landing gear under each fin; there was also a probe on the bottom to let the pilot know he had touched down. The Coleoptere used thrust deflection vanes in the engine exhaust for control during vertical flight, and it had an extendable strake on each side of the nose to improve controllability in transition to horizontal flight.
After tethered tests, the Coleoptere made its first free flight on 5 May 1959. However, on the ninth flight, on 25 July 1959, Morel lost control of the machine. He ejected, but his parachute did not open properly and he was badly injured, ending his career as a test pilot; the Coleoptere was destroyed. As with the American pogos, the conclusion was that the Coleoptere wasn't a good idea, and that was the end of the program. The C400 P2 ended up in the Le Bourget air museum.
* While the French were working on the Coleoptere, roughly in parallel a number of German firms were working on jet pogo designs in response to West German military interest in VTOL combat aircraft. Details of these designs remain obscure, but one, the Focke-Wulf "Fw 860" concept, is worth mentioning because of its innovative configuration.

The Fw 860 was a delta-winged jet fighter; it would prepare for take-off on tricycle landing pads that would jack the machine from the horizontal to the vertical position; the forward section with the cockpit would hinge downward relative to the fuselage, remaining on the level as the rest of the machine tilted up. It would then take off, with the landing gear retracting while the forward section and fuselage hinged back together again. The sequence would be reversed for landing.
The Fw 860 and other German jet pogo designs were quickly abandoned, with work moving on to other VTOL concepts, eventually emerging in the form of two sets of flight demonstrators -- the "VJ 101C" and the "VAK 101B", described elsewhere. No doubt that dropping the Fw 860 design was the right decision, but it's still a bit of a pity it was never built -- again, it would have been interesting to see if they could have got the crazy thing to work. Since the pilot didn't have to land "backwards", it sounds it might have been a better bet than the piloted pogo designs that were actually built.

Of course, the Soviets had a strong inclination to parallel Western experiments with their own, and in 1963 the Sukhoi design bureau came up with a design, the "Shkval (Squall)", powered by twin Tumanskiy turbojets and featuring an "X-wing" configuration, with canard fins on the sides of the engine intakes. It got as far as wind tunnel models, but then development was abandoned; the Soviets seem to have recognized pogos as a bad idea and apparently never flew one.
BACK_TO_TOP* One of the amazing things about the 1950s pogo aircraft experiments was the fact that these machines had no fully automated flight systems, being controlled by sheer pilot skill, and so it is surprising that there were so few accidents. The pogo configuration has, however, been successfully used in a number of small modern drones; apparently the power-to-weight issue is less troublesome at reduced scale, and the availability of lightweight composite materials translates to lighter airframes. With modern digital flight control systems, flying a pogo has become perfectly practical. One of these drones, the Aerovironment "SkyTote", actually had a distinct configurational resemblance to the Lockheed XFV-1, though it was much smaller, only 2.3 meters (7 feet 6 inches) long. It was purely experimental, with only one built.
The Bell Helicopter Company has experimented with pogo drones, having flown a small test machine, the "Hybrid Drivetrain Research Aircraft (HYDRA)", and prototypes of the "Autonomous Pod Transport (APT)". Hydra had a circular wing, with rotors mounted on both the wing and the spokes that connected the wing to the central fuselage. Each rotor was driven by its own electric motor, permitting flight control by selective throttling of the motors, as well as redundancy to keep the machine flying if a motor or two failed. Its radially-symmetric body simplified the mechanics of pogo take-offs and landings.

The APT was a biplane with a cargo pod in the center, both wings having the same form-factor, with a tilting electric motor / rotor at the top of each wingtip and a tail at the end -- each tail featuring a tilting tailplane, and a long tailfin that doubled as a landing leg. It took off and landed like a quadcopter drone, then tilted over to fly like a biplane. Bell flew prototypes of the "APT 20", with a payload of 9 kilograms (20 pounds); and the "APT 70", with a payload of 32 kilograms (70 pounds). There was also consideration of an APT with a payload weight of 450 kilograms (1,000 pounds).
Nothing came of the program, however, but pogo drone designs are perfectly common today -- mostly small, either flying wings with 2 or 4 props, or X-wings with four props. Innovative US defense manufacturer Anduril has developed a larger jet-powered pogo drone, the "Roadrunner", but it hasn't been fielded at last notice. Other military pogo designs are being tinkered with, but none are in general service just yet.
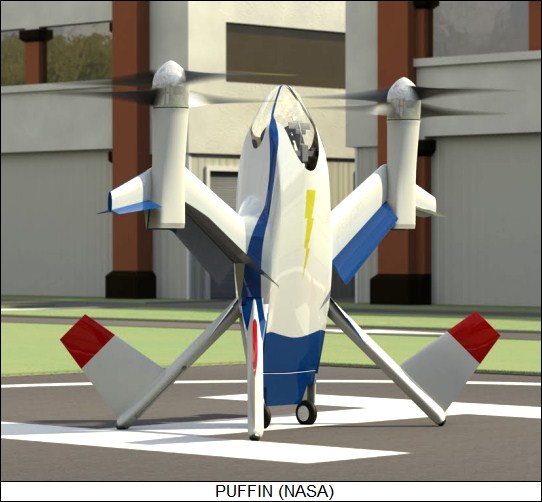
In 2010, the US National Aeronautics & Space Administration (NASA) also floated a design for a one-person pogo sport aircraft named the "Puffin". As conceived, the Puffin was battery-operated, with electric motors driving twin props and a flight endurance of a half hour, with an "X" pattern tailfin arrangement -- the tailfins popping out to provide support for landings and take-offs. The pilot lay prone in level flight, with an automatic digital flight control system ensuring safe operations even by minimally-trained pilots -- in essence, the Puffin amounted to a fun toy, a fancy theme-park thrill ride. It wasn't going to happen.
* Computer flight simulator enthusiasts have constructed a digital model of the Convair XFY-1 pogo that can be "flown" on a personal computer. It has a reputation for being one of the toughest, arguably the toughest, flightsim model to fly. A video capture of a flightsim session of the XFY-1 model had it weaving back and forth as it descended to a carrier deck, skidding, kicking off sparks on striking the deck, and almost tipping over on landing attempts -- to finally topple off the deck and explode in a fireball.
* Sources include:
Online sources included Wikipedia and the LUFT '46 website, with NASA releases providing data on the Puffin.
* Revision history:
v1.0.0 / 01 may 11 v1.0.1 / 01 apr 13 / Review & polish. v1.0.2 / 01 jan 14 / Review & polish. v1.0.4 / 01 dec 15 / Review & polish. v1.0.5 / 01 nov 17 / Review & polish. v1.0.6 / 01 oct 19 / Review & polish. v1.0.7 / 01 aug 21 / Review & polish. v1.0.8 / 01 jul 23 / Review & polish. v1.0.9 / 01 jul 25 / Review & polish.BACK_TO_TOP
