
* During the Vietnam War, the US made extensive use of modified Ryan Firebee target drones for reconnaissance over North Vietnam. A number of variants, some of them highly modified, were produced of the "Lightning Bugs" -- as the reconnaissance Firebees were known. The Lightning Bugs were effectively abandoned after the conflict, but they did lead interest in development of "high-altitude long-endurance (HALE)" drones -- not merely to obtain long range but also persistence over an operational area. This chapter describes the origins of the endurance drone concept.
* The idea of using "high-altitude long-endurance" drones for atmospheric research, earth and weather observation, and particularly communications goes back at least to the late 1950s, with conceptual studies focused on drones with conventional propulsion, or new forms of propulsion using microwave beamed power or photovoltaic solar cells.
The Raytheon company suggested what would now be described as a HALE drone helicopter operating via beamed power, flying at an altitude of 15 kilometers (9 miles), as far back as 1959, and actually performed a proof-of-concept demonstration in 1964, with a transmitting antenna powering a helicopter on a 20-meter (65-foot) tether. The helicopter carried a rectifying antenna or "rectenna" array incorporating thousands of diodes to convert the microwave beam into useful electrical power.
The 1964 demonstration received a good deal of publicity, but nothing came of it. The HALE drone was seen as a cheaper alternative to Earth satellites; however, enthusiasm for flying satellites was very high, and so interest in HALE drones was very low.
However, in the 1970s, the US National Aeronautics & Space Administration (NASA) became interested in beamed power for space applications, and in 1982 the agency published a design for a much lighter and cheaper rectenna system. The NASA rectenna was made of a thin plastic film, with dipole antennas and receiving circuits embedded in its surface. In 1987, the Canadian Communications Research Center used such an improved rectenna to power a drone with a wingspan of 5 meters (16 feet 5 inches) and a weight of 4.5 kilograms (9.9 pounds), as part of the "Stationary High Altitude Relay Platform (SHARP)" project. The SHARP drone flew in a circle at 150 meters (490 feet) above a transmitting antenna. The drone required 150 watts, and was able to obtain this level of power from the 6 to 12 kilowatt microwave beam.
* In the late 1960s, following the early microwave HALE vehicle studies, the US Air Force worked with LTV Electrosystems (later E-Systems) under the COMPASS DWELL program to build an endurance drones using much more conventional turboprop propulsion. At least part of the motivation or inspiration for this effort was derived from the IGLOO WHITE program, which was a multiservice attempt to cut the flow of supplies from North Vietnam to South Vietnam through the network of paths and roads running through Cambodia and Laos known as the "Ho Chi Minh Trail".
IGLOO WHITE involved seeding the region with thousands of seismic and acoustic sensors, most of them air-dropped, which would pick up indications of traffic along the trail and report them back to a central command center in Thailand, which would dispatch air strikes in response. The sensors were battery-operated and had limited range, so airborne radio relay aircraft orbited above the battle area to pick up the signals and pass them on to the command center.
Originally, the radio relays were EC-121 Warning Star aircraft, a military variant of the Lockheed Super Constellation four-piston-engined airliner, but these machines were expensive to operate. They were replaced by Beech Debonaire single-engine light aircraft, modified for the radio relay role and given the military designation of "QU-22A". They could be operated as drones, but apparently nobody trusted that as operational practice, and they were never flown unpiloted except on an experimental basis.
LTV Electrosystems' development effort focused on an endurance aircraft that could be flown as a piloted aircraft or a drone. A number of prototypes, including piloted and drone versions, were built and flown. They were based on a Schweizer sailplane design with major modifications by Schweizer to accommodate a Pratt & Whitney Canada (PWC) PT6A-34 turboprop engine, large fuel tanks, and operational payloads. The aircraft had fixed tricycle landing gear.

The first prototype, designated the "L-450F", was piloted. It first flew in February 1970, but was lost in an accident on its third flight in March 1970, the pilot bailing out safely. A second L-450F was built and used to complete the flight test program. The third prototype, the first drone variant, was designated the "XQM-93" and flew in early 1972. It had no cockpit or other provisions for piloted flight. It could carry a payload of 320 kilograms (700 pounds). The Air Force ordered four XQM-93s but it is unclear that all were actually delivered, since COMPASS DWELL was canceled that year.
___________________________________________________________________
LTV L-460F (XQM-93):
___________________________________________________________________
wingspan:
17.4 meters (57 feet)
length:
9.14 meters (30 feet)
empty weight:
1,090 kilograms (2,400 pounds)
max loaded weight:
2,090 kilograms (4,700 pounds)
cruising speed:
170 KPH (105 MPH / 91 KT)
service ceiling:
15,850 meters (52,000 feet)
range:
9,650 kilometers (6,000 MI / 5,220 NMI)
endurance:
30 hours maximum
___________________________________________________________________
Martin Marietta also built two prototypes of the "Model 845A" for the COMPASS DWELL program, these machines also being based on a Schweizer sailplane and similar in configuration to the XQM-93. Test flights were performed in 1971, with one of the prototypes staying aloft for almost 28 hours, but the Model 845A was canceled along with the XQM-93. The XQM-93 and the COMPASS COPEs looked forward to aircraft that would come into service in two decades, but nothing much came of the effort at the time.
BACK_TO_TOP* The push towards endurance drones from the 1970s was provoked by the need for deep reconnaissance into China. Lightning Bug reconnaissance drones, derived from the Ryan Firebee target, were flown into China during the Vietnam War, with a number shot down, and the Chinese even copying them. However, the Lightning Bugs did not have the range for deep penetrations -- most importantly, they couldn't reach the Chinese nuclear development facility at Lop Nor.
US intelligence clearly needed a long-range drone with a high degree of survivability. Such requirements spelled out a completely new design, not a modification of a target drone.
While Ryan worked on the Lightning Bugs, the company had pursued advanced drone concepts on a part-time basis. After discussions with the US Central Intelligence Agency (CIA) that went nowhere, in early 1966 Ryan pitched their advanced reconnaissance drone concepts to the US National Reconnaissance Office (NRO) -- which handled strategic reconnaissance, both with satellite and aircraft assets. The NRO was interested, and opened up a design competition, originally designated LONE EAGLE, but later changed to COMPASS ARROW. Ryan was pitted against North American Aviation, with Ryan winning the competition in June 1966 with the "Model 154" design. It was given the military designation of "AQM-91 Firefly", though it was also referred to as COMPASS ARROW after the program name.
The AQM-91 was based on an unflown Ryan concept from the early 1960s, the "Model 136 Red Wagon". Like the Model 136, the AQM-91 had an engine on its back to reduce its radar and infrared signature as seen from below, as well as twin inward-canted tailfins to conceal the exhaust stream. The AQM-91 was a substantially more sophisticated design, however, leveraging off what Ryan had learned since that time.

The AQM-91 had sloped flat sides to deflect radar signals, and was built using a high percentage of plastic composites, which had lower radar reflectivity than metal. The aircraft was powered by a General Electric YJ97-GE-3 turbojet providing 17.8 kN (1,815 kgp / 4,000 lbf) thrust, with the engine exhaust mixed with cool air to reduce infrared signature. The YJ97 was something of a unique engine, not used in any operational aircraft, derived from a General Electric demonstrator engine designated the "GE1". The AQM-91 was to carry electronic countermeasures (ECM) to further enhance its survivability.
___________________________________________________________________
RYAN MODEL 154:
___________________________________________________________________
wingspan:
14.5 meters (47 feet 8 inches)
length:
10.4 meters (34 feet 2 inches)
empty weight:
1,725 kilograms (3,800 pounds)
max loaded weight:
2,450 kilograms (5,400 pounds)
maximum speed:
815 KPH (505 MPH / 440 KT)
service ceiling:
> 23,800 meters (> 78,000 feet)
range:
7,030 kilometers (4,370 MI / 3,800 NMI)
___________________________________________________________________
Like the Lightning Bugs, the AQM-91 was to be launched by a Lockheed DC-130 Hercules director aircraft, and recovered in midair by helicopter. It had a precision-navigation autopilot system, a reconnaissance payload, and a self-destruct system to ensure that none of its sensitive gear fell into enemy hands. The primary reconnaissance payload was an Itek panoramic camera, but in principle it could also carry infrared cameras or a signals intelligence (SIGINT) payload. The guidance system was designed to provide navigation accuracies with an error of no more than half a percent, meaning that if it flew a thousand kilometers, it would be no more than five kilometers off. The guidance system proved very tricky, and first powered flight of an AQM-91 did not take place until September 1968.
The test flights were conducted over the US Southwest. The project was a deep black secret -- but on 4 August 1969 one of the prototypes decided to stop working, and parachuted itself to ground inside the Los Alamos nuclear research complex during lunch hour. Unfortunately, it didn't land in a restricted area, and local newspeople were able to take pictures of the aircraft. The pictures were published in local papers. The Air Force released a statement that the aircraft was a "high altitude target", but few believed it.
Test flights were halted for a few weeks while procedures were reviewed. The flights then resumed, culminating in long-range evaluations in late 1971. The AQM-91 passed with flying colors, exceeding its altitude requirements by a good margin, and proving almost invisible to radar. However, by that time the need for the Model 154 had evaporated. In July 1971, President Nixon began a diplomatic effort to build ties with China, and reconnaissance overflights were canceled. Satellite reconnaissance capabilities had improved through the 1960s, leading to the first launch of the advanced "Big Bird" satellite on 15 June 1971, which could provide strategic intelligence without provoking the Chinese. In addition, adversary air defenses had improved, and the Model 154 was no longer seemed very survivable.
The AQM-91 program lingered on for a few more years, but the drones were finally put into mothballs in 1973, and scrapped a few years after that. 28 had been built, including 20 production machines. They were twice as expensive as projected, largely because Ryan had recklessly underbid the contract to get the job. The high unit price helped put defense officials off drones, since it suggested they weren't as cheap a solution as their advocates claimed. Incidentally, in 1974 NRO abandoned its aircraft reconnaissance assets, handing them over to the Air Force. The NRO had become focused on space reconnaissance, with aerial assets being not much more than distraction, all the more so because of interservice squabbling over them.
* Ryan updated the Model 154 design for a more advanced derivative, the "Model 235", for the USAF COMPASS COPE drone program. The Air Force had initiated COMPASS COPE in 1971, specifying a robot aircraft that could take off and land from a runway like a manned aircraft, eliminating the need for launch and recovery aircraft. The COMPASS COPE drone would be able to operate at high altitudes for up to 24 hours to perform surveillance, communications relay, or atmospheric sampling.
Boeing was originally selected as a sole source, with the USAF awarding the company a contract for two "YQM-94A" (later "YGQM-94A") demonstrators. However, Ryan then pitched the Model 235 as an alternative, and the next year, 1972, the Air Force agreeably awarded Ryan a contract for two "YQM-98A" (later "YGQM-98A") demonstrators as well.

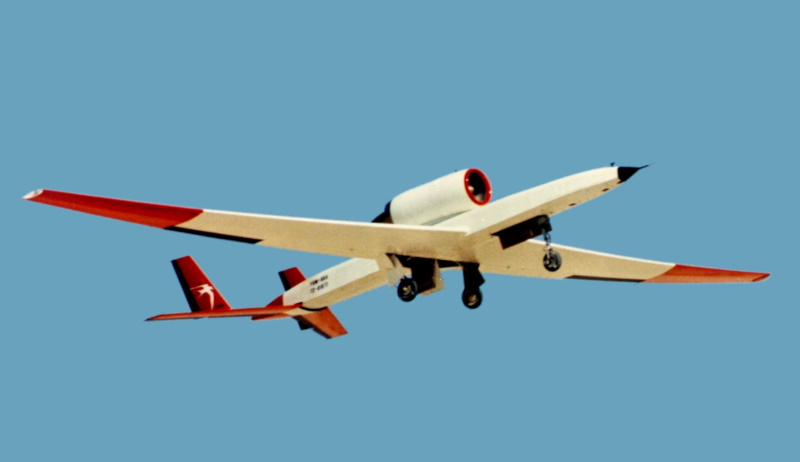
The Boeing YQM-94A was variously known as the "COMPASS COPE B", "COPE B", or "B-Gull". It was basically a jet sailplane, with long straight wings, a twin fin tail, retractable tricycle landing gear, and a turbojet perched in a pod on its back. The engine was a GE J97-GE-100 providing 23.4 kN (2,390 kgp / 5,270 lbf) thrust.
___________________________________________________________________
BOEING YQM-94A COMPASS COPE B:
___________________________________________________________________
wingspan:
27.4 meters (90 feet)
length:
12.2 meters (40 feet)
height:
3.86 meters (12 feet 8 inches)
loaded weight:
6,520 kilograms (14,400 pounds)
max speed at altitude:
~805 KPH (500 MPH / 435 KT)
service ceiling:
> 16,700 meters (> 55,000 feet)
endurance:
> 17 hours
___________________________________________________________________
The COMPASS COPE B was strictly a demonstrator, and so it was radio controlled, with no autonomous guidance capability. It had a TV camera in the nose to allow it to be flown from a ground station. Initial flight of the first demonstrator was in July 1973, but the machine crashed on its second flight, a few days later. The second demonstrator performed its first flight in November 1974, and went on to complete the evaluation program.

The Ryan YQM-98A was variously known as the "COMPASS COPE R", "COPE R", or "R-Tern". Its general configuration was similar to that of the Boeing COMPASS COPE B, resembling a jet sailplane with a twin-fin tail, retractable tricycle landing gear, and an engine in a pod on its back. The engine was a Garrett YF104-GA-100 turbofan, with 18.0 kN (1,835 kgp / 4,050 lbf) thrust. The COMPASS COPE R had a clear resemblance to the Model 154, though its wings were straight instead of swept.
___________________________________________________________________
RYAN YQM-98A COMPASS COPE R:
___________________________________________________________________
wingspan:
24.75 meters (81 feet 2 inches)
length:
11.4 meters (37 feet 4 inches)
height:
2.4 meters (8 feet)
loaded weight:
6,480 kilograms (14,310 pounds)
max speed at altitude:
805 KPH (500 MPH / 435 KT)
service ceiling:
21,300 meters (70,000 feet)
endurance:
> 28 hours
___________________________________________________________________
Initial flight of the first COMPASS COPE R demonstrator was in August 1974. However, the Boeing COMPASS COPE B won the competition in August 1976 on the basis of lower cost, with the company awarded a contract to build preproduction prototypes of the "YQM-94B" operational drone. The YQM-94B was to be bigger, with a length of 15.2 meters (50 feet) and a loaded weight of 7,800 kilograms (17,220 pounds). It was to be powered by a GE TF34-GE-100 turbofan with 26.7 kN (2,720 kgp / 6000 lbf) thrust, similar to the engine used on the Lockheed S-3A Viking carrier-based antisubmarine aircraft. The YQM-94B was to have an autonomous navigation system.
Since the evaluation of the COMPASS COPE prototypes had shown the YQM-98A to be superior to the YQM-94A in some respects, Ryan challenged the award. The exercise was a waste of effort, since the entire COMPASS COPE program was axed in July 1977, apparently because of difficulties in developing the sensor payloads.
BACK_TO_TOP* In the 1980s, new attention was focused on aircraft propelled by solar power. Solar power cells, more technically known as "photovoltaic (PV)" cells, are not highly efficient, and the amount of energy provided by the Sun over a unit area is relatively modest. This means that a solar-powered aircraft must be lightly built to allow low-power electric motors to get it off the ground.
Such lightly-built aircraft had been developed in the competition for the Kremer Prize for human-powered flight. The Kremer Prize had been set up in 1959 by Henry Kremer, a British industrialist, and offered 50,000 British pounds in prize money to the first group that could fly a human-powered aircraft over a figure-eight course covering a total of 1.6 kilometers (a mile). In the early 1970s, Dr. Paul B. MacReady and his AeroVironment company came up with an unorthodox aircraft, the "Gossammer Condor", that pilot Bryan Allen flew to win the Kremer Prize on 23 August 1977. The Gossamer Condor was basically a flying wing, modified with the addition of a gondola for the pilot underneath and a canard control surface extended in front, and was mostly built of lightweight plastics.
The next logical step was to build a solar-powered piloted aircraft. In 1980, Dupont Corporation backed AeroVironment in an attempt to build a solar-powered piloted aircraft that could fly from Paris, France to England. The first prototype, the "Gossamer Penguin", was fragile and not very airworthy, but led to a better aircraft, the "Solar Challenger". The Solar Challenger had a wingspan of 14.3 meters (47 feet) and a weight of 90 kilograms (200 pounds). Its wings were covered with 16,128 PV cells, with a total output power of 2,600 watts, about enough to drive a pair of hair driers. The Solar Challenger was capable of reaching an altitude of 3,660 meters (12,000 feet), and in July 1981 the aircraft accomplished the 262-kilometer (163-mile) flight from Paris to Manston in the UK.
* This success led in turn to AeroVironment concepts for a solar-powered drone for HALE applications. A solar-powered drone could in principle stay aloft indefinitely, as long as it had a power-storage system to keep it flying at night. The aerodynamics of such an aircraft were challenging, since to reach high altitudes it had to be much lighter per unit area of wing surface than the Solar Challenger, and finding an energy storage system with the necessary high capacity and light weight was troublesome as well.
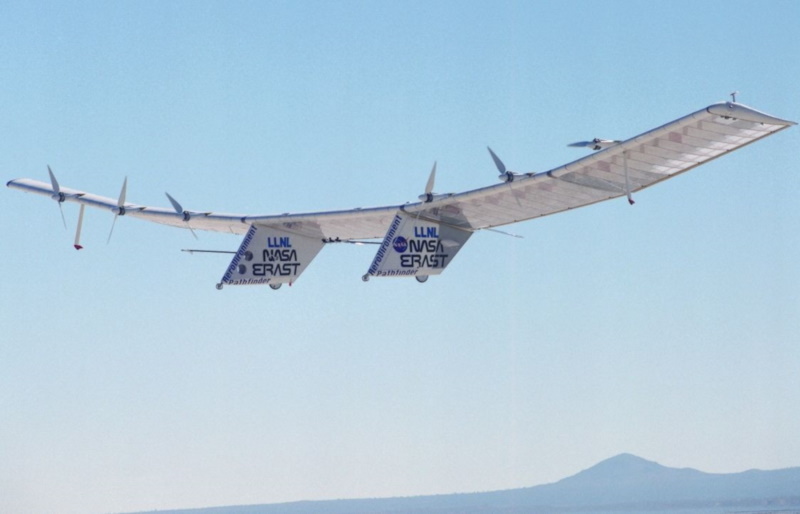
In 1983, AeroVironment was able to obtain funding from an unspecified US government agency to secretly investigate the concept, which was designated "High Altitude Solar (HALSOL)". The HALSOL prototype first flew in June 1983. HALSOL was a simple flying wing, with a span of 30 meters (98 feet 5 inches) and a width of 2.44 meters (8 feet). The main wing spar was made of carbon fiber composite tubing, with ribs made of styrofoam and braced with spruce and Kevlar, and covered with thin Mylar plastic film. The wing was light but very strong.
The wing was built in five segments of equal span. Two gondolas hung from the center segment, with the gondolas carrying payload, radio control and telemetry electronics, and other gear. The gondolas also provided the landing gear. Each gondola had dual baby-buggy wheels in front and a bicycle wheel in back for landing gear. HALSOL was propelled by eight small electric motors driving variable-pitch propellers. There were two motors on the center wing segment, two motors on each inner wing segment, and one motor on each outer wing segment. The aircraft's total weight was about 185 kilograms (410 pounds), with about a tenth of that being payload.
Nine HALSOL flights took place in the summer of 1983 at the isolated and secret Groom Lake base in Nevada. The flights were conducted using radio control and battery power, since the drone had not been fitted with solar cells. HALSOL's aerodynamics were validated, but the investigation led to the conclusion that neither PV cell nor energy storage technology were mature enough to make the idea practical for the time being.
HALSOL was put into storage. A decade later, it would be recovered from storage, to lose two motors -- it is unclear if the remaining six were uprated in compensation -- and acquire PV cell arrays as the US National Aeronautics & Space Administration (NASA) "Pathfinder" drone. It would go through further modifications and set a number of records for endurance drones, indeed proving a pathfinder for solar-powered endurance drone technology.
In the mid-1980s, not long after HALSOL went into mothballs, NASA awarded a contract to Lockheed to study a solar-powered HALE drone named the "Solar High Altitude Powered Platform (Solar HAPP)" for missions such as crop monitoring, military reconnaissance, and communications relay. The Solar HAPP effort did not result in a prototype. Solar-powered HALE drones were a concept a bit ahead of their time, and early practical work on endurance drones focused on more conventional concepts.
* In the mid-1980s, Boeing developed a large and capable HALE drone named the "Condor" that was a significant milestone in the development of endurance drones. The Condor featured lightweight composite and honeycomb structures, autonomous controls, high altitude aerodynamics, and a fuel-economical propulsion system.
The Condor was rolled out in March 1986, with first flight on 9 October 1988. It set an altitude record for piston-powered aircraft of 20,420 meters (66,980 feet) during its 141-hour flight test program, and stayed aloft for two and a half days during one of its test flights. Boeing consulted with Dick Rutan, pilot of the Earth-circling "Voyager" piloted aircraft, on the design of the Condor.
About 60% of the Condor's loaded weight was fuel, all of which was carried in wing tanks. The drone had a boxy fuselage, 1.32 meters high and 0.86 meters wide (52 by 34 inches), that was designed for mounting antennas and sensors. The drone's large size gave it a large payload capacity, and during test flights it carried about 815 kilograms (1,800 pounds) of instruments. The Condor could be broken down to allow it to be flown to remote sites in a large transport aircraft.

The Condor was powered by two flat-six liquid-cooled Teledyne Continental piston engines, each providing 131 kW (175 HP). The engines featured a two-stage turbocharging system for high altitude operation, and drove three-blade composite tractor propellers 4.9 meters (16 feet) in diameter. The engines drove the propellers through a two-speed gearbox that shifted the propellers to higher RPM at high altitude.
___________________________________________________________________
BOEING CONDOR:
___________________________________________________________________
wingspan:
61 meters (200 feet)
length:
20.7 meters (68 feet)
empty weight:
3.630 kilograms (8,000 pounds)
loaded weight:
9,070 kilograms (20,000 pounds)
cruise speed:
370 KPH (230 MPH / 200 KT)
service ceiling:
20,000 meters (65,000 feet)
endurance:
2.5 days
___________________________________________________________________
The Condor used duplicate, redundant flight control computers. It was capable of operating autonomously from take-off to landing, using a flight control program consisting of 60,000 lines of FORTRAN code, with some assembly language optimization. Communications links allowed a mission to be modified in flight. The Condor took off on a dolly with outriggers that drop off on the wingtips, and lands with a skid and a nosewheel. The scheme reduced the weight penalty of full landing gear. Boeing invested over $100 million USD on the Condor, with some assistance from DARPA, but found no buyers for the aircraft, and it ended up in the Hiller Museum in San Carlos, California.
BACK_TO_TOP
