
* The Predator series of drones was intended mostly for the tactical role; work was performed in parallel on drones for the strategic role. The effort was initially focused on the Lockheed Martin "RQ-3A Darkstar" drone, though that program proved "snakebitten" and was canceled. Further work on the Northrop Grumman "RQ-4 Global Hawk" proved more successful, with the Global Hawk now in extensive operational service. Following the Global Hawk, work is underway towards "ultra-long duration" drones for extended high-altitude surveillance missions.
* The Gnat 750 and Predator were the first in a series of "Tier drones" considered by the US Air Force. In the USAF plan, the Gnat 750 was known as "Tier 1", while the Predator was known as "Tier 2". The original expectation was that the series would then move on to a very large and powerful long-range drone known as "Tier 3", something along the lines of a B-2 Stealth bomber. This was not exactly a new idea, there having been work in the 1980s and on a comparable machine under the "Advanced Airborne Reconnaissance System (AARS)" program.
AARS remains mysterious, with the "super drone" investigated under the program being known by various obscure codenames, one of the better-known being "Quartz". AARS involved a wide range of investigations, but it never produced operational hardware. It was a completely gold-plated program and was canceled in 1992 since the end of the Cold War had eliminated its expected mission. Although AARS designs were dusted off and tuned down for Tier 3, that program ran into budget cutting and was canned in turn in 1993. The entire AARS / Tier 3 fiasco soaked up a good deal of money and did much to inhibit development of drones in the USA during the 1980s.
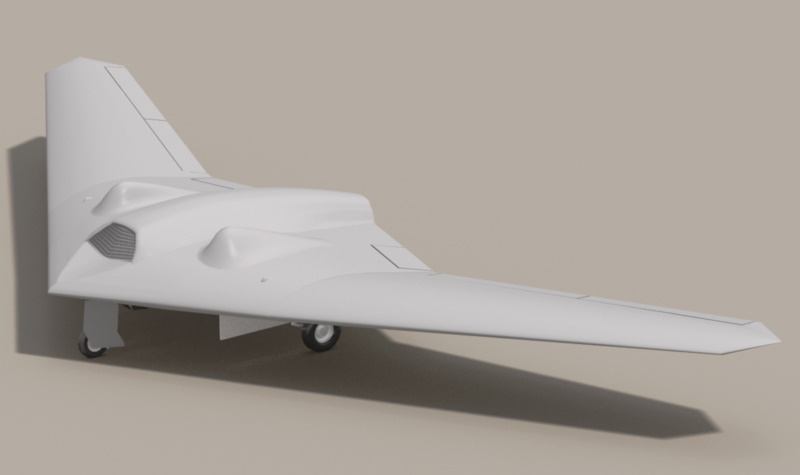
In place of Tier 3, the USAF decided to develop a smaller "Tier 3-" drone designated the "Darkstar", and a "Tier 2+" drone, something like a "super Predator", the Teledyne-Ryan "Global Hawk". The Lockheed Martin / Boeing Tier 3- Darkstar was a stealthy design that resembled a big pumpkin seed with a long straight wing at the rear. It was to send real-time still images produced by either SAR or EO sensors, though it didn't have the capacity to carry both sensors at the same time. Data was to be returned using a satellite communications link with a bandwidth of 1.5 megabits per second (MBPS). The Darkstar was intended to penetrate protected airspace to observe high-value targets for a limited amount of time. Range and endurance were intended to be similar to that of the Predator, though the Darkstar's sensor suite could cover over twice the area, and of course it was harder to detect.

The Darkstar was powered by a Williams Research FJ-44-1A turbofan engine with 8.46 kN (862 kgp / 1,900 lbf) thrust, and could carry a 450-kilogram (1,000-pound) payload. The drone was to cost about $10 million USD.
___________________________________________________________________
LOCKHEED MARTIN / BOEING RQ-3A DARKSTAR:
___________________________________________________________________
wingspan:
21 meters (69 feet)
length:
4.6 meters (15 feet)
height:
1.5 meters (5 feet)
empty weight:
1,980 kilograms (4,360 pounds)
max loaded weight:
3,900 kilograms (8,600 pounds)
cruise speed:
555 KPH (345 MPH / 300 KT)
service ceiling:
15,200 meters (50,000 feet)
endurance:
12 hours
___________________________________________________________________
The Darkstar was unlucky. On its second take-off in the spring of 1996, it stood up on one wing and slammed into the runway, bursting into fire and smoke. An analysis of the failure showed flight software and take-off procedures to be faulty.
The Air Force and the contractors didn't give up right away, and a redesigned Darkstar, now formally designated "RQ-3A", flew in the early summer of 1998. However, the program was still unhealthy, and the Darkstar was canceled in early 1999. Although flight tests were generally satisfactory, the Darkstar was by no means close to being a useful operational system. Building an actual operational drone based on the Darkstar would have required major redesign and improvement, and the costs were more than the Air Force was willing to spend.
* At least that was the official line. In the summer of 2003, confirming rumors that had been in circulation for some time, Air Force officials announced that Lockheed Martin's "Skunk Works" had developed several prototypes of a stealthy reconnaissance drone similar to the Darkstar but larger, and that this machine had been used in an operational evaluation over Iraq during the American invasion of that country in the spring of 2003.
The unnamed drone's payload was described as less than that of a Lockheed Martin U-2 spyplane, featuring a "low probability of intercept (LPI)" SAR and electro-optic sensors, along with a satcom datalink. Range was less than that of the Global Hawk, described below, though cost is described as several times greater. The Air Force wanted to conduct the operational evaluation to see if putting the new machine into production was worthwhile. The most likely operational base for the drone was Al Udeid Air Base in Qatar, which has extensive and well-developed facilities, is near to Iraq, and was off-limits to reporters during the invasion of Iraq.
In 2005, the Skunk Works did unveil a drone named the "Polecat" that could, in development, be used as a high-altitude stealthy reconnaissance platform along the lines of the Darkstar, as well as for other missions such as strike. The Polecat was a flying wing, something like a "mini-B-2", powered by twin Williams Research FJ44-3E turbofans, with a 4,080 kilogram (9,000 pound) take-off weight and a span of 27.4 meters (90 feet). It had a centerline payload bay for 450 kilograms (1,000 pounds) of sensors or munitions, and a ceiling of 18,300 meters (60,000 feet).
Lockheed Martin officials said the machine was strictly a demonstrator, intended to validate technologies for future military requirements, and was not designed in response to any specific current requirement. The Polecat crashed in December 2006 after only three flights, and no more was heard about it as such. However, in late 2007, a drone that had considerable similarity to the Polecat was observed at Kandahar Air Base in Afghanistan, with the mystery machine nicknamed the "Beast of Kandahar".
In late 2009 the USAF confirmed the existence of the Beast, identifying it as the Lockheed-Martin "RQ-170 Sentinel" but providing no details. The RQ-170, also known by the name of "Wraith", is judged to be an unarmed tactical surveillance platform with a degree of stealth. Several dozen are believed to have been built, the type having seen its introduction to combat in the Iraq invasion of 2003.
One was forced down in Iran in late 2011 due to a technical failure and captured. The Iranians displayed a reverse-engineered duplicate in 2014; it was judged to be a subscale demonstrator, since the Iranians could not possibly come up with a full equivalent of such a sophisticated machine in such a short period of time.
There are also rumors of an "RQ-180" being developed as a secret program by Northrop Grumman, It is believed to have made its first flight in 2010, and been in operational evaluation from 2014. There are hints it is a large flying wing, like the Stealth Bomber. It does seem to truly exist, but details have yet to be confirmed.
BACK_TO_TOP* With the death of the Darkstar, the Ryan RQ-4A Global Hawk became the Air Force's great hope for a strategic drone reconnaissance platform. With the purchase of Ryan by Northrop Grumman in July 1999, the aircraft became the Northrop Grumman Global Hawk.
The Global Hawk was not particularly stealthy, but it had sophisticated long-range sensors to allow it to operate outside of hostile air defenses, and could survey as much as 100,000 square kilometers (40,000 square miles) of terrain a day. In comparison to the Predator, if a Global Hawk were flown out of San Francisco, it would be able to fly to Maine, observe a 370 x 370 kilometer (230 x 230 mile) grid for 24 hours, and then fly back home.
The Global Hawk was powered by an Allison Rolls-Royce AE 3007H turbofan engine with 31.4 kN (3,200 kgp / 7,050 lbf) thrust, and carried a payload of 900 kilograms (2,000 pounds). The fuselage was mostly of conventional aluminum airframe construction, while the wings were made of carbon composite.

The Global Hawk initially carried the "Hughes Integrated Surveillance & Reconnaissance (HISAR)" sensor system. HISAR was a lower-cost derivative of the ASARS-2 package that Hughes developed for the U-2. HISAR was also fitted in the US Army's RC-7B Airborne Reconnaissance Low Multifunction (ARLM) manned surveillance aircraft. HISAR integrated a SAR-MTI system, along with an optical and an infrared imager. All three sensors were controlled and their outputs filtered by a common processor. The digital sensor data could be transmitted at up to 50 MBPS to a ground station in real time, either directly or through a communications satellite link.
The SAR-MTI system operated in the X-band and provided a number of operational modes:
The visible and infrared imagers shared the same gimbaled sensor package, and used common optics, providing a telescopic close-up capability. The Global Hawk was also fitted with a countermeasures suite for self-defense.
___________________________________________________________________
NORTHROP GRUMMAN RQ-4A GLOBAL HAWK:
___________________________________________________________________
wingspan:
35.4 meters (116 feet 2 inches)
length:
13.5 meters (44 feet 5 inches)
height:
4.6 meters (15 feet 2 inches)
empty weight:
3,850 kilograms (8,490 pounds)
max loaded weight:
10,400 kilograms (22,900 pounds)
cruise speed:
650 KPH (404 MPH / 350 KT)
service ceiling:
20,000 meters (65,000 feet)
endurance:
34 hours
___________________________________________________________________
First flight of the Global Hawk was on 28 February 1998. Five prototypes were built, and put through a thorough flight test program. Beginning in the spring of 1999, the Global Hawk performed a series of operational evaluation flights, some of which were remarkable demonstrations of the aircraft's capability. One of the prototypes flew from Eglin Air Force Base in the Florida panhandle to Alaska and back again, nonstop and unrefueled, in just under 25 hours.
In May 2000, a prototype flew up the Atlantic coast of the US from Eglin AFB, transmitting radar images to a US Army ground station at Fort Bragg, North Carolina, and the aircraft carrier USS GEORGE WASHINGTON, at dock at Norfolk, Virginia. The RQ-4A then proceeded across the Atlantic, monitoring shipping movements, and reached its final target, an amphibious landing exercise near Setubal, Portugal. Once done, the Global Hawk retraced its steps and landing at Eglin, 28 hours after its departure.
The program suffered setbacks in 1999, with one RQ-4A lost and another badly damaged in accidents. The Global Hawk was scheduled to reach operational service in late 2001, and this timeframe coincided with the US intervention in Afghanistan. Four Global Hawks were available at the time, though only three were regarded as suitable for operations. These three drones were operated in the war, though specific details of their missions are unclear. One crashed in December 2001 due to a malfunction.
Global Hawks also served in the invasion of Iraq in the spring of 2003. Although details of their service there were sketchy, apparently their SAR payload came in very handy for pinning down targets during intense sandstorms. Ironically, despite the service of the Global Hawks in these conflicts, none of them that flew these operations were actually regarded as production machines. The first production RQ-4A, the eighth Global Hawk built, was finally rolled out in the summer of 2003. A base for Global Hawks was built in the United Arab Emirates to help keep a better eye on the region.
* The Global Hawk became a very high priority program for the Air Force. The initial version, the "Block 0", was an evaluation variant, though as mentioned above, it was used operationally as well. It was followed by the "Block 10", which featured an improved sensor and self-protection suite, and more electrical power. The improved self-protection suite included a towed decoy, plus improved radar warning receiver and jammer. The drone autonomously acted on the information from the self-protection system, deciding whether to abort the mission, take evasive action, or continue with the towed jammer deployed. The remote operator could override whatever decision was taken.
BACK_TO_TOP* Northrop Grumman went on to produce the "Block 20" or "RQ-4B" Global Hawk, with the first rolled out in August 2006. This variant featured an uprated engine; a wingspan stretch from 35.4 meters (116 feet) to 39.9 meters (130 feet 10 inches); and a fuselage stretch from 13.5 meters (44 feet) to 14.5 meters (47 feet 7 inches). The RQ-4B provided 50% more electrical power than the RQ-4A and carried a larger payload, of up to 1,360 kilograms (3,000 pounds) as opposed to 910 kilograms (2,000 pounds); it also had an improved communications system, and an "open architecture" that made updates simpler.
In addition, it included the Raytheon "Enhanced Integrated Sensor Suite (EISS)" to replace the early sensor system. Four specialized RQ-4Bs in a communications relay configuration and known as the "EQ-4B Battlefield Aerial Communications Node (BACN)" were acquired, these drones being complemented by crewed BACN platforms based on the Bombardier Global Express business jet. A "Block 30" Global Hawk, which went into service in 2011, carried a version of the ASIP SIGINT package. The Block 0 and Block 10 were phased out with the ramp-up in service of the Block 20 and 30, though some of the older machines were used for trials.
However, at that point the program went into a stall, with the Block 30 proclaimed to be more expensive and less capable than expected, with availability rates being unsatisfactory. In early 2012, the Air Force announced the service had no further interest in the Block 30, deciding instead to provide further upgrades to the U-2. The plan was to mothball existing Block 30s. However, the US Congress then told the Air Force they had to buy the Block 30s anyway -- and in 2014 the Air Force reversed its position, deciding to go with the Block 30 and drop the U-2. One confusing factor is the secret RQ-180, hinting that the ambivalence over the Block 30 reflected hidden activity in a secret program. To confuse matters further, the Air Force then decided to keep the U-2 flying.
Whatever the real facts, production moved on to the "Block 40", which carried the "AN/ZPY-2 Multi-Platform Radar Technology Insertion Program (MP-RTIP)", providing an advanced AESA multifunction radar. MP-RTIP originally started out as an upgrade program for the E-8 Joint-STARS crewed battlefield reconnaissance aircraft, based on the Boeing 707-320 jetliner, but the scope of the program expanded to envision the development of an AESA that could be adapted for use on a range of platforms.
Raytheon and Northrop Grumman were awarded a contract for the MP-RTIP system in late 2000, with Raytheon to build the AESA and Northrop Grumman to perform systems integration. The Global Hawk was selected as the initial target system for MP-RTIP, with initial tests on trials platforms from 2005. First flight of the initial Block 40 was in late 2009. The Block 40 could be clearly recognized by the rectilinear canoe-style fairing on its belly for the MP-RTIP array.
Northrop Grumman has used demonstrator Global Hawks for inflight refueling tests, one drone being fitted with a refueling system and another fitted with a refueling probe. It is unclear if this scheme was intended for operational use by the Global Hawk fleet, or was merely a technology investigation for drone midair refueling in general.
The Air Force has been working on a modular "Agile Pod" that can carry from three to five sensor systems. It will carried by both the Global Hawk and the U-2, and possibly other platforms. The initial configuration will carry a multi-spectral imager, an infrared imager with a long-range lens, an imaging laser radar, and possibly a hyper-spectral sensor. In the meantime, the RQ-4Bs sensor suite has been progressively updated.
The first combat loss of a Global Hawk was on 20 June 2019, when the Iranians shot one down with a surface-to-air missile. The Americans said the drone was over international airspace at the time; the Iranians insisted that it had been in Iranian airspace. The US government tightened sanctions on Iran -- not by much, since they were already painfully tight -- with cyber attacks launched against Iranian facilities.
* NASA obtained three Global Hawks for research purposes, fitting them with an environmental sensor suite, and following the conflict in Afghanistan, the US Navy also became interested in the Global Hawk, ordering two Block 10 machines, the quantity later expanded to four. The drones were used to evaluate concepts for a naval endurance drone under the "Broad Area Maritime Surveillance (BAMS)" program, which would complement manned maritime patrol aircraft. The four Block 10 machines were labeled "BAMS-D", "D" meaning "demonstrators".

The Navy conducted a competition for BAMS whose contenders included drone version of the Gulfstream 550 business jet, offered by Boeing; a derivative of the Predator B called the "Mariner", offered by a Lockheed Martin / General Atomics team; and the Global Hawk, offered by Northrop Grumman. In the spring of 2008, the Navy selected the Global Hawk for BAMS. Two RQ-4A drones were obtained for program evaluation at the outset, though they ended up being put to good use in operational service.
A prototype "MQ-4C" BAMS air vehicle, based on the enlarged RQ-4B Block 20 Global Hawk configuration, was rolled out in 2012, the machine being given the name of "Triton". Initial flight was on 22 May 2013, with two more prototypes following, initial delivery in late 2017, with introduction to full operational service scheduled for 2023.
The MQ-4C was not designed for carrier operation, only flying out of land bases, but it could be controlled by airborne and maritime platforms. It featured some airframe reinforcement and a de-icing system, since the Navy wanted to be able to operate at low altitudes for "close-ups" when necessary. The payload included:
Initial Triton deliveries featured a payload in "Integrated Functional Capability (IFC) 3" configuration, with an "IFC-4" configuration delivered from 2024 -- with improved hardware and software, the software providing greater integration of systems. Triton's systems give it a targeting capability, but the Navy has no interest in weapons carriage.

Germany planned to obtain a fleet of five "Eurohawks", Global Hawks fitted with an Airbus-built SIGINT suite. The Germans obtained one for evaluation in 2011, only to cancel the program in 2013, because of problems of operating the drone in controlled public airspace. The evaluation machine ended up in a museum.
However, in 2018 the Germans ordered four MQ-4C Tritons, of course along with the ground-control systems, to be modified by Airbus Defense & Space to German specifications for the SIGINT role. Other foreign buyers have acquired the type:
More international sales are expected.
BACK_TO_TOP* The Global Hawk has been followed by efforts to develop very long endurance drones, conceptually along the lines of HALSOL, capable of staying aloft for a week or more. This work has not gone smoothly.
There has been some difference of opinion over the use of solar power for very long endurance. In June 2005, the AeroVironment company began flying a demonstrator for the "Global Observer", a HALE drone powered strictly by hydrogen. The demonstrator, the "GO-0", had a wingspan of 15.25 meters (50 feet) and obtained power from the hydrogen fuel using a fuel cell.
Three scaled-up "GO-1" machines were ordered by a group of six US government organizations with SOCOM in the lead, with the first performing its initial flight on 5 August 2010. The GO-1 was of more conventional configuration than the Helios and its brethren, featuring a conventional arrangement along the lines of a fat, oversized sailplane with fixed tricycle landing gear and four props on the wings. It had a wingspan of 53.4 meters (175 feet), a payload of 180 kilograms (400 pounds), and an endurance of five to seven days. A fuel cell was not used in the GO-1; instead, the liquid hydrogen fuel was burned in an internal combustion engine to generate power for the electric motors driving the four props. Initial test flights were on battery power only, with the engine system installed for later test flights.
The program suffered a setback on 1 April 2011, when the first GO-1 crashed at Edwards AFB in California. The crash led to the cancellation of the program in 2012. The HAPSMobile company, a partnership between Aerovironment and Softbank of Japan, did go on to build a solar-powered drone, the HAWK 30, with initial flight in 2019. The HAWK 30 looked like the Helios, being a flying wing with a span of 78 meters (256 feet) and ten electric motors. It is not clear what the status of the HAWK 30 is.
* Using company funds, Boeing worked on a somewhat comparable drone known as the "Phantom Eye", which used hydrogen fuel to directly drive twin four-cylinder automotive-type engines built by Ford, each fitted with a three-stage turbocharger for high-altitude operation. Boeing built a demonstrator with a wingspan of 46 meters (150 feet) and an endurance of four days, with first flight performed in the spring of 2012. The production machine was to be about 50% bigger and have an endurance of a week. The program did not advance beyond the demonstrator, with the drone's last flight in 2014, the machine being later handed over to a museum.

In late 2010 Aurora Flight Sciences rolled out the first of three "Orion" long-endurance drone demonstrators for the US Air Force. It was somewhat reminiscent of the Boeing Condor, a large drone with twin piston engines and a flight endurance of 120 hours. The project started in 2006, when Aurora began studies for the US Army for a long-endurance drone; the effort then began to shift organizationally, becoming a joint capability technology demonstration (JCTD) effort run by the Air Force Research Lab as the "Medium Altitude Global Intelligence, Surveillance, Reconnaissance & Communications (MAGIC)" program. It was supposed to perform its initial flight in 2011, but due to funding problems it didn't take place until 24 August 2013.
Orion had a length of 15.25 meters (50 feet) and a wingspan of 40.25 meters (132 feet). Empty weight was 2,345 kilograms (5,170 pounds) and MTO is 5,065 kilograms (11,170 pounds), including 450 kilograms (1,000 pounds) of payload and a whopping 2,270 kilograms (5,000 pounds) of fuel. Fuel could be traded off for stores loads up to a total of kilograms (2,500 pounds), with gear in forward and rear fuselage bays and on a pylon under each wing, each pylon being capable of hauling 545 kilograms (1,200 pounds) of stores -- including fuel tanks, munitions, or equipment pods. It typically had an E/O turret under the nose, though other reconnaissance kit such as a SAR or wide-area imager can be carried, and it had a satcom antenna in a bulbous nose. The drone had tricycle landing gear -- with the main gear being fixed in spats and the nose gear retracting backward to clear the field of view of the turret -- and a cruciform tail arrangement.
Powerplants were twin turbocharged Austro Engines AE300 diesels, the same as used on the well-known Diamond DA42 Twinstar, rated at 125 kW (170 HP) each and driving three-bladed variable props. The engines provided excellent fuel economy, permitting an operational range of 17,575 kilometers (10,925 miles / 9,500 NMI) and a ferry range of 24,050 kilometers (14,950 miles / 13,000 NMI). Not too surprisingly, the Orion was slow, with a speed of only about 165 KPH (105 MPH / 90 KT). In 2015, the Air Force decided not to obtain the Orion, though there has been some interest from other services, and flight tests have continued sporadically.
In 2019, the Air Force Research Laboratory (AFRL) announced that it had flown a HALE drone -- "Ultra-Long Endurance Aircraft Platform (Ultra LEAP)" -- for 2.5 days. It was based on a commercial light sport aircraft, the manufacturer not being named for security reasons. However, images of the Ultra LEAP suggest the airframe was obtained from Pipistrel of Slovenia, which is known to have provided the Air Force with drone versions of their light sport aircraft for earlier efforts in the LEAP program.
In any case, the AFRL built up the airframe with extremely long wings, the ability to carry a modular ISR payload, a data link with satcom capabilities, and a highly autonomous flight system. Not much has been said about the Ultra LEAP since 2019, but the LEAP program has been cloaked by secrecy; indeed, it's a bit surprising that AFRL said anything about the Ultra LEAP in the first place.
* Solar-powered long-endurance drones are now more publicly visible. European aerospace giant Airbus has been developing and flying a "Zephyr" series of solar-powered drones, the objective being to commercially introduce what the firm calls "high-altitude pseudo-satellites".
Airbus started working on pseudo-satellites in 2008, aiming to fill the "capability gap" between satellites in orbit and the low-altitude, limited-endurance drones of the day. The original Zephyr demonstrators were built by QinetiQ, a British defense research company, with the "Zephyr 7" setting an endurance record of over 14 days in 2010, to be sold off to Airbus in 2013. Airbus went on to fly the "Zephyr 8", officially the "Zephyr S", which had a wingspan of 25 meters (82 feet) and a weight of 75 kilograms (165 pounds), being about 50% heavier than the Zephyr 6. It first flew in 2018, establishing a flight endurance record of almost 26 days. In 2021, it reached an altitude of 23,915 meters (76,100 feet) during endurance flights, and in 2022 one flew continuously for 64 days.
Airbus has flown a quarter-scale model of the "Zephyr T", which will extend the wingspan of the Zephyr S to 32.9 meters (108 feet). The Zephyr T will also be larger, 136 kilograms (300 pounds), and will have a payload capacity of 20 kilograms (44 pounds), four times as much as the Zephyr S, enough for a lightweight but capable surveillance or relay payload. The two drones are clearly similar in appearance, but the Zephyr S has one tail, while the well bigger Zephyr T has two tails. The branch of Airbus responsible for the Zephyr has been labeled "Aalto", and has been pitching it to both military and commercial users.

BAE Systems of the UK has worked with the Prismatic company on a comparable long-endurance solar-powered drone, the "Persistent High-Altitude Solar Aircraft (PHASA) 35", with a wingspan of 35 meters (115 feet), a loaded weight of 150 kilograms (330 pounds), and an endurance of up to a year. It has a single fuselage and twin props, one on each wing. A small-scale demonstrator was flown, with the full-scale article being put through trials in Australia from early 2020, and performing stratospheric test flights in 2023.
The Spanish-American firm Skydweller, backed by the Italian Leonardo group, is developing a solar HALE drone as well, based on the Swiss-built SOLAR IMPULSE piloted aircraft, which flew around the world in 2015:2016. Skydweller will feature a high degree of flight autonomy -- that is, piloting itself. Initial flights were in 2020, though it hasn't been introduced to service at last notice.
Closer to home, social media company Facebook dabbled in aerospace, with plans to fly a solar-powered flying-wing drone, the "Aquila", intended to fly above 18,300 meters (60,000 feet) for three months, acting as an internet communications relay in regions of the world now denied access. Initial flight of a prototype was in 2016, but the effort didn't go well, being abandoned in 2018.
Aurora Flight Sciences has returned to its roots under new owner Boeing and built a solar-powered drone, the "Odysseus", with a wingspan of 74 meters (243 feet) and a projected endurance of three months. An initial prototype has been built, but it appears the program has been put on the back burner.

NASA has been working with Swift Engineering on a solar-powered HALE drone, of course named the "Swift", with a wingspan of 22 meters (72 feet), a weight of 82 kilograms (180 pounds), and a payload capacity of 7 kilograms (15 pounds). Initial flight was in 2020. So far, progress in this new generation of HALE drones has been slow and frustrating.
BACK_TO_TOP* This document started life as a component of a comprehensive survey of drone technology that I initially released on my website in 2001, and updated to 2013. By that time, it had become completely unwieldy and impossible to maintain, so I then withdrew it -- with the intent of breaking it up into smaller, manageable documents as could be made out of it. Hence this document.
The use of the term "drone" tends to be frowned upon in the industry. I had started out writing on the subject using the term "unmanned aerial vehicle (UAV)" -- but then -- but then the industry started preferring the term "UAS" for "unmanned aerial system", which ended up making the choice of the proper term confusing. Add to that other terms used for drones over the years like "remotely piloted vehicle (RPA)" and "remotely piloted aircraft (RPA)", and the acronym wars became intolerable.
Before I decided to use the term "drone", I reassured myself by checking websites like TIME, THE ECONOMIST, and BBC WORLD Online sites, and did searches on "drones" -- to find that the mass media is perfectly comfortable with it. Since I'm writing for the general audience, or at least as general an audience that's going to read a book on drones, that's good enough for me. For those who object, my apologies, but I'm not going to change it.
* Sources include:
* Illustrations details:
* Revision history:
v1.0.0 / 01 dec 17 / Began life as PREDATOR & GLOBAL HAWK. v1.1.0 / 01 jan 20 / General clean-up and update. v1.2.0 / 01 feb 22 / Enhanced, beoming PREDATOR, REAPER, & GLOBAL HAWK. v1.3.0 / 01 jan 24 / Review, update, & polish. (+)BACK_TO_TOP

